Среди разнообразия выпускаемых на сегодняшний день типов электрических моторов большое распространение получили асинхронные двигатели. Их мощность и эффективность обеспечивает использование в деревообрабатывающей и металлообрабатывающей промышленности, в насосных агрегатах, на фабриках, в станках и ручном электрическом инструменте.
Асинхронный двигатель: что это
Асинхронный двигатель – это асинхронная электрическая машина, применяемая для преобразования электрической энергии в механическую. Асинхронный дословно означает неодновременный – здесь имеется в виду, что у асинхронного двигателя магнитное поле всегда имеет большую частоту вращения, чем ротор, который словно пытается его догнать. Работают эти машины от сетей с переменным током.
Любой асинхронный двигатель состоит из двух ключевых составляющих: ротора и статора. Эти части не контактируют между собой и отделены друг от друга воздушным зазором, в котором формируется подвижное магнитное поле.
Статор асинхронной машины состоит из следующих частей:
- Корпус. Служит для скрепления всех деталей мотора. Для двигателей небольшого размера, как правило, используют цельные литые корпусы из чугуна, стальных и алюминиевых сплавов.
- Сердечник или магнитопроводник. Собирается из пластин, для изготовления которых применяют специальную электрическую сталь. Запрессовывается в корпус и улучшает магнитно-индукционные качества машины. Каждая пластина сердечника покрывается особым лаком, позволяющим уменьшить потери при возникновении вихревых токов. В некоторых случаях устройство асинхронного двигателя предусматривает установку корпуса-сердечника, совмещающего в себе обе функции.
- Обмотки. Устанавливаются в пазы сердечника. Представляет собой три катушки из меднопроволочных секций, расположенные под углом в 120˚ относительно друг друга. Называется первичной, потому что подключается к сети напрямую.
Конструкция ротора состоит из основного блока с вентиляционной крыльчаткой, опирающегося на подшипники. Связь ротора с приводимым в движение механизмом обеспечивается с помощью прямого подключения, редукторов или других способов передачи механической энергии. В асинхронных двигателях используются два вида роторов:
- Массивный ротор – единая схема из прочного ферромагнитного соединения. Внутри неё индуцируются токи, и она же выполняет в конструкции роль магнитопровода.
- Короткозамкнутый ротор (изобретён великим русским инженером Михаилом Осиповичем Доливо-Добровольским, как и весь трёхфазный ток) – система соединенных с помощью колец проводников, похожая по внешнему виду на беличье колесо. Внутри него индуцируются токи, чье электромагнитное поле вступает во взаимодействие с магнитным полем статора, в результате чего ротор приводится в движение.
Рекомендуем посмотреть это видео. Оно хоть и старое, но интересное и познавательное. Позволит закрыть непонятные моменты.
Трехфазный асинхронный двигатель. Принцип работы
Принцип действия асинхронного двигателя заключается во взаимном расположении обмоток и трехфазном напряжении, что приводит к возникновению вращающегося магнитного поля, которое и выступает движущей силой.
Подробнее говоря, при подаче питания на первичную обмотку, на фазах образуются три магнитных потока, изменяющихся в зависимости от частоты входного напряжения. Они смещены между собой не только в пространстве, но и во времени, благодаря чему и появляется вращающийся магнитный поток.
Во время вращения результирующий поток создает ЭДС в роторных проводниках. По причине того, что обмотка ротора представляет собой замкнутую цепь, в ней создается ток, создающий пусковой момент в направлении вращения магнитного поля статора. Это приводит к вращению ротора после превышения пусковым моментом его тормозного момента. Наблюдаемое в этот момент явление называется скольжением — величиной, показывающей в виде процентов соотношение частоты вращения магнитного поля к частоте вращения ротора.
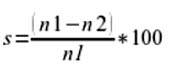
(n1 – частота магнитного поля статора; n2 – частота вращения ротора)
Скольжение является очень важным параметром. На старте его величина всегда равна 1 и, естественно, становится меньше по мере увеличения разности между n1 и n2, что сопровождается также уменьшением электродвижущей силы и вращающего момента. Во время работы на холостом ходу скольжение минимально и растет по мере увеличения статического момента. Достигнув критического скольжения (обозначается как sкр), может спровоцировать опрокидывание двигателя. После уравновешивания тормозного и электромагнитного момента изменения величин прекращаются.
Таким образом, принцип действия асинхронного двигателя основывается на взаимодействии магнитного поля ротора, находящегося во вращении, и токов, наведенных в роторе этим же полем. При этом обязательным условием возникновения вращающего момента является разница частот вращения полей.
Однофазный асинхронный двигатель
Фактически, любой асинхронный электродвигатель является трехфазным и предусматривает подключение к трехфазной сети с напряжением 380 В. Однофазным или двухфазным его называют при подключении к однофазной электросети с напряжением 200 В, когда питание подается лишь на две обмотки. В такой схеме на основную рабочую обмотку подается чистая фаза от сети, а на другую питание идет через фазосдвигающий элемент, как правило, конденсатор. Такая схема позволяет создать необходимую индукцию для смещения ротора и запустить асинхронный двигатель от однофазной сети. Для дальнейшей его работы даже необязательно, чтобы пусковая обмотка (которую подключают через конденсатор) оставалась под напряжением.
Дело в том, что трехфазный асинхронный двигатель продолжает функционировать (под малой нагрузкой) даже если во время работы от него отключить подачу энергии по одному из питающих проводов, сымитировав таким образом работу от однофазной сети. Это обусловлено тем, что результирующее магнитное поле сохраняет вращение.
Двухфазный асинхронный двигатель
Создать вращающееся магнитное поле можно и при использовании двухфазных обмоток. Для обеспечения работоспособности схемы фазы обмоток необходимо расположить с 90˚ смещением друг от друга. При их питании токами, которые смещены по фазе на 90˚, возникает вращающееся магнитное поле, как и в трехфазной машине.
Асинхронный двухфазный электродвигатель приводится в движение за счет токов, образуемых при взаимодействии результирующего поля с роторными стержнями. Он ускоряется до того момента, пока не будет достигнута предельная скорость его вращения. Для питания такого двигателя от электросети однофазного тока необходимо создать сдвиг по фазе на одной из обмоток. Для этого применяются конденсаторы необходимой ёмкости.
На сегодняшний день все большее применение находят двухфазные асинхронных двигатели с полым алюминиевым ротором. Вращение ему придают вихревые токи, образованные внутри цилиндра, при взаимодействии с вращающимся магнитным полем.
Инерционный момент ротора наделяет двигатель хорошими характеристиками для использования в некоторых специализированных отраслях, как, например, системы, регулирующие работу мостовых и компенсационных схем. Одна из обмоток в них подключается к питающей сети через конденсатор, а через вторую проходит управляющее напряжение.
Схемы подключения
Для того чтобы подключить трехфазный асинхронный двигатель используют несколько различных схем, но чаще всего применяются «треугольник» и «звезда».
Треугольник
Преимущество данной схемы заключается в том, что при подключении согласно ей трехфазный двигатель может развивать наибольшую номинальную мощность. Для этого обмотки соединяются по принципу конец-начало, что на схематичном изображении похоже на треугольник, однако в виде треугольника понять что к чему, не всегда удобно. По этому предлагаем для анализа схему снизу, а затем фотографию уже в сборе (еще ниже).
В трехфазных электрических сетях величина линейного напряжения между выводами обмоток составляет 380 В. При этом нет необходимости создания рабочего нуля. Важно отметить, что в такой схеме может возникнуть большой пусковой ток, значительно перегружающий проводку.
Звезда
Этот способ подключения является наиболее используемым в сетях с трехфазным током 380 В. Название схемы связано с тем, что концы обмоток соединяются в одной точке, словно звездные лучи. Начала обмоток подключаются посредством аппаратуры коммутации к фазным проводникам. В такой конструкции линейной напряжение между начал составляет 380 В, а между местом соединения и подключения проводника – 200 В. Ниже представлена схема, а еще ниже уже фотография в собранном виде.
Трехфазный двигатель для 380 В сетей, подключенный таким образом, не способен развить максимальную силу из-за того, что напряжение на каждой обмотке составляет 220 В. В свою очередь, такая схема предотвращает возникновение перегрузок по току, чем обеспечивается плавный пуск.
Возможность подключения двигателя тем или иным способом, как правило, указывается на его табличке. Значок Y означает «звезду», а ∆ — «треугольник». Определить схему на уже подключенной машине можно по виду обмоток – одна двойная перемычка между ними говорит, что использована «звезда» (первое фото снизу), а если между клеммами обмоток видно три перемычки – «треугольник» (первое фото сверху).
В случае, когда необходимо запустить трехфазный асинхронный электродвигатель в обратном направлении вращения, следует поменять два питающих провода от трехфазного источника местами.
Функциональные и эксплуатационные особенности
Характерные преимущества асинхронных двигателей:
- В их конструкции нет коллекторных групп, которые увеличивают износ других видов двигателей за счет дополнительного трения.
- Питание асинхронных электрических машин не требует использования преобразователей и может осуществляться промышленной трехфазной сети.
- Из-за меньшего количества деталей и конструктивных элементов они относительно легко обслуживаются и имеют большой срок службы.
Среди недостатков можно отметить:
- Сфера применения асинхронных двигателей несколько ограничена из-за малого пускового момента.
- Высокая реактивная мощность, которую они потребляют во время работы, не оказывает влияние на механическую мощность.
- Большие пусковые токи, потребляемые на пуске этих двигателей, могут превышать допустимые значения некоторых систем.
Как производятся расчеты
Для того чтобы вычислить частоту вращения двигателя следует воспользоваться определенной нам ранее формулой скольжения:
И выразить из нее скорость вращения ротора:
В качестве примера возьмем двигатель модели АИР71А4У2 мощностью в 550 Вт с 4 парами полюсов и частотой вращения ротора 1360 об/мин.
При питании от сети с частотой 50 Гц статор будет вращаться со скоростью:
Таким образом, величина скольжения электродвигателя составляет:
И, наконец, прекрасное, хотя и устаревшее, видео рекомендуемое всем для одноразового просмотра.

В асинхронном двигателе ротор движется «сам по себе». В нем изначально нет ни магнитного поля, на него не подается никакого электрического напряжения. Он даже не обязан быть сделанным из железа — магнитного металла. Ну а вот, поди ж ты, стоит подключить к двигателю трехфазное напряжение, и ротор закрутился. Безо всякого подталкивания. Но по-своему.
Два вида электродвигателей переменного тока
Асинхронные двигатели — наивная простота
Ротор то догоняет волну, то слегка отстает, потому что синхронно с ней бежать просто не может. Такое явление назвали «скольжением», догнав бегущее магнитное поле, ротор с беличьей клеткой теряет магнитную индукцию и дальше некоторое время просто скользит по инерции. А когда трение или нагрузка вынуждают его отстать от бегущего поля, он опять «почувствует» в себе изменения силовых линий обгоняющего его поля и снова обретет индукцию, а вместе с этим и силы двигаться.

То есть, ротор слегка проскальзывает: то догоняет бегущее равномерно по кругу магнитное поле, то «забывает, зачем бежал» и слегка приотстает, то снова «спохватывается» и опять стремится догнать. Постепенно эти отклонения стабилизируются — в зависимости от трения в подшипниках и величины нагрузки на вал — и асинхронный двигатель начинает работать просто со скоростью вращения, чуть меньшей частоты напряжения на статоре. Эта разница частот и называется частотой скольжения.
Двигатели синхронные: сложное в простом
Для того, чтобы ротор был связан с бегущей волной магнитного поля катушек статора жестким образом, придумали электродвигатель синхронный. А проблема решается просто. В роторе вместо изменяющегося магнитного поля от короткозамкнутых токов беличьей клетки нужно использовать постоянные магниты и их магнитное поле.

Вариантов два. Или это поле от постоянного магнита, закрепленного в роторе, или это поле от электромагнитов, установленных в роторе вместо такого магнита.
Обычный магнит, конечно, проще. Но тогда для стандартного функционирования таких электромоторов нужно, чтобы на них на всех — а используются тысячи электромоторов — магниты были строго одинаковы. Иначе параметры движения будут разными, а магниты еще имеют свойство размагничиваться.
Электромагнит, установленный в роторе двигателя, легче заставить вырабатывать поле нужного качества, но требуется электрический ток для его работы. Такой ток, который называется током возбуждения, в свою очередь нужно где-то брать и как-то на ротор подавать.

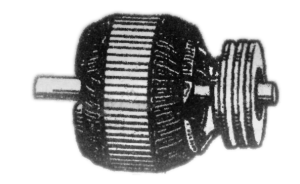
1 – ротор,
2 – коллектор возбуждения
Отсюда и происходит некоторое разнообразие конструкций синхронных двигателей. Но важнее всего то, что синхронные двигатели крутят свой вал строго синхронно частоте бегающего по кругу поля катушек статора, то есть скорость их вращения точно равна — или кратна (если обмоток статора больше трех) — частоте переменного тока в питающей сети.
Однако кроме всего прочего, синхронный двигатель обладает свойством полной обратимости. Потому что синхронный электродвигатель — это тот же самый генератор электрического тока, но работающий «в обратную сторону». В генераторе некоторая механическая сила вращает вал с ротором, и от этого в обмотках статора возникает наведенное электрическое напряжение от вращающегося магнитного поля ротора. А отличие синхронного двигателя от генератора в том, что напряжение в катушках статора порождает бегающее по кругу магнитное поле, которое, взаимодействуя с постоянным магнитным полем ротора, толкает его, чтобы ротор тоже вращался.
Только если в генераторе вращению ротора можно механически придать любую скорость, и от этого будет изменяться частота переменного тока, им генерируемого, то в синхронном двигателе такой роскоши нет. Синхронный двигатель вращается со скоростью изменения напряжения в сети, а оно у нас выдерживается строго в 50 герц.
Отличия и недостатки этих двигателей
Отличия синхронного и асинхронного двигателей ясны из их названий. Собственно, плюсы имеют и тот, и другой вариант конструкции. Ниже перечислены плюсы, которыми отличаются оба двигателя — синхронный и асинхронный.

Асинхронный двигатель отличается от синхронного следующими параметрами:
- простота конструкции и невысокая стоимость;
- нет скользящих контактов, надежность в эксплуатации;
- напряжение прикладывается к неподвижным катушкам статора;
- ротор очень прост по конструкции;
- при запуске и разгоне постепенно наращивает мощность;
- возможность реверсировать направление вращения, просто поменяв местами две питающих фазы;
- при остановке движения (слишком большая механическая нагрузка на вал ротора) никакой аварии не происходит, может произойти перегрев беличьей клетки.
Отличия синхронного двигателя от асинхронного заключаются в следующем:
- стабильная скорость вращения вне зависимости от нагрузки на вал;
- невысокая чувствительность к перепадам напряжения в сети;
- при уменьшении механической нагрузки способен по инерции работать как генератор, не забирая энергию, а отдавая ее в сеть;
- высокий КПД;
- способен компенсировать реактивную мощность сети.
Но у каждого имеются и присущие только ему недостатки.
Асинхронный имеет следующие отрицательные черты:
- трудность регулировки частоты вращения;
- невысокая частота вращения;
- зависимость отставания частоты вращения от нагрузки на ось;
- при работе ротор нагревается за счет короткозамкнутых токов — требуется дополнительное охлаждение.
Недостатки синхронного двигателя:
- сложнее по конструкции;
- в некоторых конструкциях для проводки тока возбуждения в обмотки ротора используется коллектор, как в двигателе постоянного тока;
- труднее запускается.


Несмотря на различия, оба электрических двигателя нашли себе применение в технике и используются в самых разных исполнениях и размерах.
8 марта 1889 года величайший русский учёный и инженер Михаил Осипович Доливо-Добровольский изобрёл трёхфазный асинхронный двигатель с короткозамкнутым ротором.
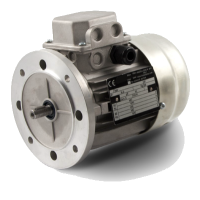
Современные трёхфазные асинхронные двигатели являются преобразователями электрической энергии в механическую. Благодаря своей простоте, низкой стоимости и высокой надёжности асинхронные двигатели получили широкое применение. Они присутствуют повсюду, это самый распространённый тип двигателей, их выпускается 90% от общего числа двигателей в мире. Асинхронный электродвигатель поистине совершил технический переворот во всей мировой промышленности.
Огромная популярность асинхронных двигателей связана с простотой их эксплуатации, дешивизной и надежностью.
Асинхронный двигатель – это асинхронная машина, предназначенная для преобразования электрической энергии переменного тока в механическую энергию. Само слово “асинхронный” означает не одновременный. При этом имеется ввиду, что у асинхронных двигателей частота вращения магнитного поля статора всегда больше частоты вращения ротора. Работают асинхронные двигатели, как понятно из определения, от сети переменного тока.
Устройство
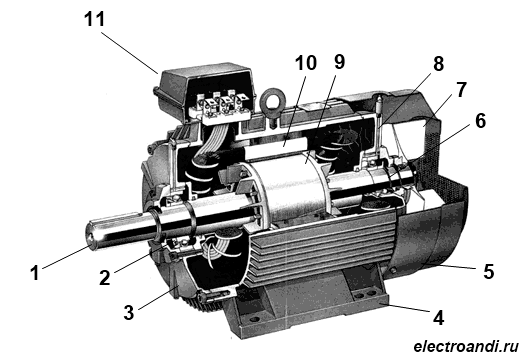
На рисунке: 1 – вал, 2,6 – подшипники, 3,8 – подшипниковые щиты, 4 – лапы, 5 – кожух вентилятора, 7 – крыльчатка вентилятора, 9 – короткозамкнутый ротор, 10 – статор, 11 – коробка выводов.
Основными частями асинхронного двигателя являются статор (10) и ротор (9).
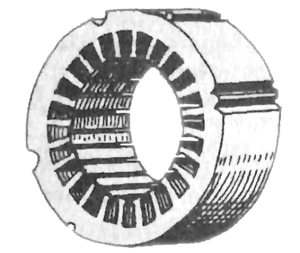
Статор имеет цилиндрическую форму, и собирается из листов стали. В пазах сердечника статора уложены обмотки статора, которые выполнены из обмоточного провода. Оси обмоток сдвинуты в пространстве относительно друг друга на угол 120°. В зависимости от подаваемого напряжения концы обмоток соединяются треугольником или звездой.
Роторы асинхронного двигателя бывают двух видов: короткозамкнутый и фазный ротор.
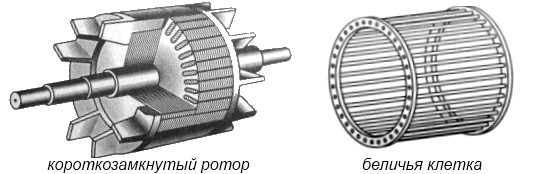
Короткозамкнутый ротор представляет собой сердечник, набранный из листов стали. В пазы этого сердечника заливается расплавленный алюминий, в результате чего образуются стержни, которые замыкаются накоротко торцевыми кольцами. Эта конструкция называется "беличьей клеткой". В двигателях большой мощности вместо алюминия может применяться медь. Беличья клетка представляет собой короткозамкнутую обмотку ротора, откуда собственно название.
Фазный ротор имеет трёхфазную обмотку, которая практически не отличается от обмотки статора. В большинстве случаев концы обмоток фазного ротора соединяются в звезду, а свободные концы подводятся к контактным кольцам. С помощью щёток, которые подключены к кольцам, в цепь обмотки ротора можно вводить добавочный резистор. Это нужно для того, чтобы можно было изменять активное сопротивление в цепи ротора, потому что это способствует уменьшению больших пусковых токов. Подробнее о фазном роторе можно прочитать в статье – асинхронный двигатель с фазным ротором.
Принцип работы
При подаче к обмотке статора напряжения, в каждой фазе создаётся магнитный поток, который изменяется с частотой подаваемого напряжения. Эти магнитные потоки сдвинуты относительно друг друга на 120°, как во времени, так и в пространстве. Результирующий магнитный поток оказывается при этом вращающимся.
Результирующий магнитный поток статора вращается и тем самым создаёт в проводниках ротора ЭДС. Так как обмотка ротора, имеет замкнутую электрическую цепь, в ней возникает ток, который в свою очередь взаимодействуя с магнитным потоком статора, создаёт пусковой момент двигателя, стремящийся повернуть ротор в направлении вращения магнитного поля статора. Когда он достигает значения, тормозного момента ротора, а затем превышает его, ротор начинает вращаться. При этом возникает так называемое скольжение.
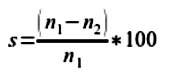
Скольжение s – это величина, которая показывает, насколько синхронная частота n1 магнитного поля статора больше, чем частота вращения ротора n2, в процентном соотношении. 
Скольжение это крайне важная величина. В начальный момент времени она равна единице, но по мере возрастания частоты вращения n2 ротора относительная разность частот n1-n2 становится меньше, вследствие чего уменьшаются ЭДС и ток в проводниках ротора, что влечёт за собой уменьшение вращающего момента. В режиме холостого хода, когда двигатель работает без нагрузки на валу, скольжение минимально, но с увеличением статического момента, оно возрастает до величины sкр – критического скольжения. Если двигатель превысит это значение, то может произойти так называемое опрокидывание двигателя, и привести в последствии к его нестабильной работе. Значения скольжения лежит в диапазоне от 0 до 1, для асинхронных двигателей общего назначения оно составляет в номинальном режиме – 1 – 8 %.
Как только наступит равновесие между электромагнитным моментом, вызывающим вращение ротора и тормозным моментом создаваемым нагрузкой на валу двигателя процессы изменения величин прекратятся.
Выходит, что принцип работы асинхронного двигателя заключается во взаимодействии вращающегося магнитного поля статора и токов, которые наводятся этим магнитным полем в роторе. Причём вращающий момент может возникнуть только в том случае, если существует разность частот вращения магнитных полей.