Синхронные электродвигатели отличаются от асинхронных гораздо большей мощностью и полезной нагрузкой. Изменения тока возбуждения позволяет регулировать в них нагрузку. В отличие от асинхронных двигателей в синхронных при ударных нагрузках сохраняется постоянство частоты вращения, что позволяет их использовать в различных механизмах в металлургической и металлообрабатывающей промышленности.
Двигатели с синхронным типом действия способны развивать мощность до 20 тысяч кВт, что очень важно для приведения в действие исполнительных механизмов мощных обрабатывающих станков в машиностроении и других отраслях производства. Например, в высокопроизводительных гильотинных ножницах, где имеются большие ударные нагрузки на ротор электродвигателя.
Синхронные электрические двигатели с успехом используются в качестве источников реактивной мощности в узлах нагрузки для поддержания стабильного уровня напряжения. Довольно часто двигатели с синхронным принципом действия используются в качестве силовых машин в компрессорных установках большой производительности.
Мощные двигатели выполняются с использованием системы встречной вентиляции, при которой лопасти вентилятора расположены на роторе. Экономичный и надежный синхронный двигатель обеспечивает производительную и экономичную работу насосного оборудования.
Важной характеристикой синхронных электрических машин является сохранение постоянной скорости вращения, что важно для вращения приводов в виде насосов, компрессоров, вентиляторов, и различных генераторов переменного тока. Ценным также является возможность регулирования реактивного тока за счет вариаций тока возбуждения обмоток якоря. Благодаря этому увеличивается показатель косинуса φ при всех диапазонах работы, что увеличивает кпд двигателей и снижает потери в электрических сетях.
Сами двигатели с синхронным принципом действия устойчивы к колебаниям напряжения в сети, и обеспечивают постоянство скорости вращения при их возникновении. Синхронные электродвигатели при понижении питающего напряжения сохраняют большую перегрузочную способность, по сравнению с асинхронными. Способность к форсированию тока возбуждения при понижениях напряжения повышает надежность их работы при аварийных снижениях питающего напряжения в электрической сети.
Синхронные электрические машины рентабельны при мощностях свыше 100 кВт и основное применение находят для вращения мощных вентиляторов, компрессоров и других силовых установок. В качестве недостатков синхронных машин можно отметить их конструктивную сложность, наличие внешнего возбуждения обмоток ротора, сложность запуска и довольно высокие стоимостные характеристики.
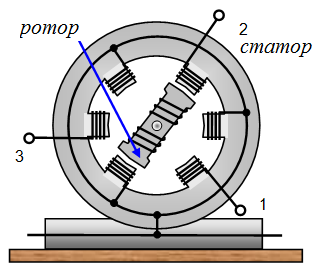
Принцип действия синхронного электродвигателя основывается на взаимодействии вращения магнитного поля якоря с магнитными полями полюсов индуктора. Якорь обычно располагается на статоре, а индуктор на подвижном роторе. При больших мощностях полюсами служат электромагниты, при этом постоянный ток подается на ротор через скользящие кольцевые контакты.
В маломощных двигателях используются постоянные магниты, расположенные на роторе. Существуют также синхронные машины с обращенным принципом работы, когда якорь размещен на роторе, а индуктор на статоре. Однако такая конструкция применяется в двигателях старых конструкций.
Синхронные электрические машины могут работать в генераторном режиме, когда якорь расположен на статоре для удобства отбора генерируемого электричества. На этом принципе основаны мощные генераторы, работающие на гидроэлектростанциях.
Трехфазные асинхронные двигатели составляют основу современного электропривода. От ДПТ их отличает простота конструкции, надежность, высокие технико-экономические показатели. В настоящее время частотные преобразователи позволили сделать регулировочные свойства АД более лучшими, чем у ДПТ с НВ.
По конструкции ротора АД разделяются на двигатели и короткозамкнутым ротором (КЗР) и двигатели с фазным ротором (ФР). Наиболее простая конструкция у АД с КЗР. Ротор такого двигателя не имеет выводов, так как его обмотка выполнена в виде короткозамкнутой клетки (беличья клетка). Его обмотка выполнена в виде ряда медных или алюминиевых стержней, расположенных по периметру сердечника ротора, замкнутые в двух сторон короткозамыкающими кольцами. Простота конструкции обеспечивает им высокую надежность, простоту обслуживания и невысокую стоимость. Схема включения АД СС КЗР представлена на рис. 4.1, а.
Фазный ротор имеет трехфазную обмотку, выполненную по типу обмотки статора (рис. 4.1, б). Одни концы катушек соединены в нулевую точку («звезда»), а другие – подключены к контактным кольцам. На кольца наложены щетки, осуществляющие скользящий контакт с обмоткой ротора. При такой конструкции возможно подсоединение к обмотке ротора пускового или регулировочного реостата, позволяющего менять электрическое сопротивление в цепи ротора. Такие двигатели более сложны в изготовлении и эксплуатации, поэтому применяются только там, где применение АД с КЗР не обеспечит требованиям в приводу механизма.
Ротор АД отстаёт от вращающегося магнитного поля статора, которое создается обмоткой статора, то есть вращение происходит асинхронно. В этих условиях вращающееся поле статора индуцирует ЭДС в обмотке роторе, под действием которого в роторе протекает ток, который взаимодействует с вращающимся магнитным полем (ВМП), создавая вращающий момент двигателя. В рабочих режимах разница частот вращения статора и ротора не велика и составляет несколько процентов. При рассмотрение рабочих процессов АД обычно используют понятие скольжения 
 .
.
Скорость асинхронного двигателя в рабочих режимах
 ,
,
где синхронная частота вращения магнитного поля  ;
;  – частота питающего напряжения
– частота питающего напряжения  ;
;  – число пар полюсов.
– число пар полюсов.
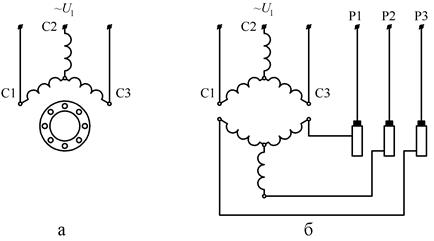 |
| Рис. 4.1. Схема включения асинхронных двигателей с КЗР (а) и ФР (б) |
Статор синхронного двигателя (СД) конструктивно не отличается от статора АД. Ротор СД имеет явнополюсную конструкцию, на полюсах которого расположена обмотка возбуждения. При включении обмотки к источнику постоянного тока в двигателе создается дополнительное магнитное поле. Таким образом, для работы синхронного двигателя кроме 3х-фазного переменного напряжения требуется также постоянное. Исключение составляют двигатели, возбуждаемые постоянными магнитами. Такие двигатели обладают абсолютно жесткой механической характеристикой: ротор двигателя вращается синхронно с вращающимся магнитным полем с частотой  .
.
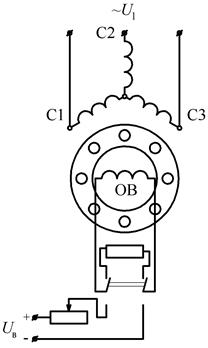 |
| Рис. 4.2. Схема включения СД |
В отличие от АД, синхронные не создают пускового момента, так как ротор двигателя по причине инерционности не может мгновенно разогнаться до синхронной скорости. Для пуска СД необходимо предварительно привести его во вращение до скорости, близкой к синхронной (  . С этой целью применяют асинхронный пуск, для чего на роторе двигателя располагается пусковая обмотка, конструктивно похожая на беличью клетку.
. С этой целью применяют асинхронный пуск, для чего на роторе двигателя располагается пусковая обмотка, конструктивно похожая на беличью клетку.
Процесс асинхронного пуска СД протекает следующим образом (рис. 4.2).
При включении обмотки статора СД в сеть СД запускается как асинхронный. При этом обмотку возбуждения замыкают на сопротивление для ограничения величины ЭДС, которая наводится в ОВ при пуске двигателя. При достижении скорости вращения близкой к номинальной, обмотку возбуждения подключают к постоянному напряжению, и двигатель втягивается в синхронизм, то есть скорость вращения двигателя становится равной синхронной скорости.
Синхронные двигатели изготавливаются на большие мощности: от сотен до тысяч киловатт. Объясняется это тем, что при меньших мощностях их применение нецелесообразно по технико-экономическим показателям.
СД обычно имеют целевое назначение, то есть каждая серия разработана для конкретных механизмов (для шаровых мельниц – СДМЗ, для привода компрессоров – СДК, для привода насосов – ВДС и др.).
Синхронные двигатели имеют перегрузочную способность  .
.
Еще одной особенностью СД является возможность работать с величиной  , более того, при перевозбуждении синхронный двигатель начинает генерировать емкостную нагрузку. Для повышении
, более того, при перевозбуждении синхронный двигатель начинает генерировать емкостную нагрузку. Для повышении  в сети используют синхронные компенсаторы, представляющие собой перевозбужденные СД специальной конструкции, работающие без нагрузки на валу.
в сети используют синхронные компенсаторы, представляющие собой перевозбужденные СД специальной конструкции, работающие без нагрузки на валу.
Механические характеристики синхронного двигателя представлены на рис. 4.3 (прямая 1).
Для синхронных двигателей важное значение имеет угловая характеристика, то есть зависимость момента синхронной машины от угла  . Угол – это угол между напряжением на статоре и ЭДС двигателя. При значениях, больших 90 градусов, как видно из рис. 4.4, двигатель выпадает из синхронизма, так как участок угловой характеристики при
. Угол – это угол между напряжением на статоре и ЭДС двигателя. При значениях, больших 90 градусов, как видно из рис. 4.4, двигатель выпадает из синхронизма, так как участок угловой характеристики при  является неустойчивым.
является неустойчивым.
В данной статье рассмотрим принципиальные отличия синхронных электродвигателей от асинхронных, чтобы каждый читающий эти строки мог бы эти различия четко понимать.
Асинхронные электродвигатели более широко распространены сегодня, однако в некоторых ситуациях синхронные двигатели оказываются более подходящими, более эффективными для решения конкретных промышленных и производственных задач, об этом будет рассказано далее.
Прежде всего давайте вспомним, что же вообще такое электродвигатель. Электродвигателем называется электрическая машина, предназначенная для преобразования электрической энергии в механическую энергию вращения ротора, и служащая в качестве привода для какого-нибудь механизма, например для приведения в действие подъемного крана или насоса.
Еще в школе всем рассказывали и показывали, как два магнита отталкиваются одноименными полюсами, а разноименными — притягиваются. Это постоянные магниты. Но существуют и переменные магниты. Каждый помнит рисунок с проводящей рамкой, расположенной между полюсами подковообразного постоянного магнита.
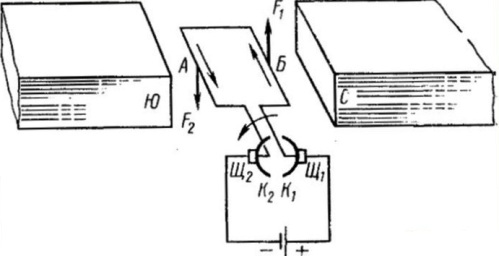
Горизонтально расположенная рамка, если по ней пустить постоянный ток, станет поворачиваться в магнитном поле постоянного магнита под действием пары сил (Сила Ампера), пока не будет достигнуто равновесие в вертикальном положении.
Если затем по рамке пустить постоянный ток противоположного направления, то рамка повернется дальше. В результате такого попеременного питания рамки постоянным током то одного, то другого направления, достигается непрерывное вращение рамки. Рамка здесь представляет собой аналог переменного магнита.
Приведенный пример с вращающейся рамкой в простейшей форме демонстрирует принцип работы синхронного электродвигателя. У любого синхронного электродвигателя на роторе есть обмотки возбуждения, на которые подается постоянный ток, формирующий магнитное поле ротора. Статор же синхронного электродвигателя содержит обмотку статора, для формирования магнитного поля статора.
При подаче на обмотку статора переменного тока, ротор придет во вращение с частотой, соответствующей частоте тока в обмотке статора. Частота вращения ротора будет синхронна частоте тока обмотки статора, поэтому такой электродвигатель называется синхронным. Магнитное поле ротора создается током, а не индуцируется полем статора, поэтому синхронный двигатель способен держать синхронные номинальные обороты независимо от мощности нагрузки, разумеется, в разумных пределах.
Асинхронный электродвигатель в свою очередь отличается от синхронного. Если вспомнить рисунок в рамкой, и рамку просто накоротко замкнуть, то при вращении магнита вокруг рамки, индуцируемый в рамке ток создаст магнитное поле рамки, и рамка будет стремиться догнать магнит.
Частота вращения рамки под механической нагрузкой будет всегда меньше частоты вращения магнита, и частота не будет поэтому синхронной. Этот простой пример демонстрирует принцип действия асинхронного электродвигателя.
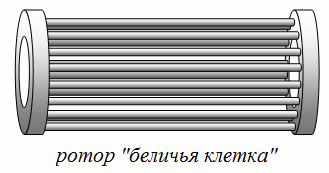
В асинхронном электродвигателе вращающееся магнитное поле формируется переменным током обмотки статора, расположенной в его пазах. Ротор типичного асинхронного двигателя обмоток как таковых не имеет, вместо этого на нем расположены накоротко соединенные стержни (ротор типа «беличья клетка»), такой ротор называется короткозамкнутым ротором. Бывают еще асинхронные двигатели с фазным ротором, там ротор содержит обмотки, сопротивление и ток в которых можно регулировать реостатом.
Итак, в чем же принципиальное отличие асинхронного электродвигателя от синхронного? С виду внешне они похожи, порой даже специалист не отличит по внешним признакам синхронный электродвигатель от асинхронного. Главное же отличие заключается в устройстве роторов. Ротор асинхронного электродвигателя не питается током, а полюса на нем индуцирутся магнитным полем статора.
Ротор синхронного двигателя имеет обмотку возбуждения с независимым питанием. Статоры синхронного и асинхронного двигателя устроены одинаково, функция в каждом случае одна и та же — создание вращающегося магнитного поля статора.
Обороты асинхронного двигателя под нагрузкой всегда на величину скольжения отстают от вращения магнитного поля статора, в то время как обороты синхронного двигателя равны по частоте «оборотам» магнитного поля статора, поэтому если обороты должны быть постоянными при различных нагрузках, предпочтительней выбирать синхронный двигатель, например в приводе гильотинных ножниц лучше всего справится со своей задачей мощный синхронный двигатель.

Область применения асинхронных двигателей сегодня очень широка. Это всевозможные станки, транспортеры, вентиляторы, насосы, – все то оборудование, где нагрузка сравнительно стабильна, или снижение оборотов под нагрузкой не критично для рабочего процесса.
Некоторые компрессоры и насосы требуют постоянной частоты вращения при любой нагрузке, на такое оборудование ставят синхронные электродвигатели.
Синхронные двигатели дороже в производстве, чем асинхронные, поэтому если есть возможность выбора и небольшое снижение оборотов под нагрузкой не критично, приобретают асинхронный двигатель.
Синхронные электродвигатели широко применяются в электроприводах, не требующих регулирования частоты вращения. По сравнению с асинхронными двигателями они имеют ряд преимуществ:
более высокий коэффициент полезного действия;
возможность изготовления двигателей с низкой частотой вращения, что позволяет отказаться от промежуточных передач между двигателем и рабочей машиной;
частота вращения двигателя не зависит от нагрузки па его валу;
возможность использования в качестве компенсирующих устройств реактивной мощности.
Синхронные электродвигатели могут являться потребителями и генераторами реактивной мощности. Характер и значение реактивной мощности синхронного двигателя зависят от величины тока в обмотке возбуждения. Зависимость тока в обмотке, выдающей напряжение в электрическую сеть, от тока возбуждения носит название U-образной характеристики синхронного двигателя. При 100%-ной нагрузке на валу двигателя его косинус фи равен 1. При этом электродвигатель не потребляет реактивной мощности из электрической сети. Ток в обмотке статора при этом имеет минимальное значение.